丂巹偨偪偼擔忢惗妶偺拞偱柍堄幆偺偆偪偵帇妎偐傜懡偔偺忣曬傪庢摼偟偰偄傑偡丅椺偊偽奜傪曕偔巹偨偪偺帇奅偵偼丄嬻傪旘傇捁丄摴傪曕偔將丄岞墍偱巕嫙偑搳偘偨儃乕儖丄摴楬傪憱傞幵側偳懡偔偺帇妎忣曬偑懚嵼偟偰偄傑偡丅偙傟傜偺帇妎忣曬偐傜丄巹偨偪偼恎偺夞傝偵懚嵼偡傞暔懱偲帺屓偲偺埵抲娭學傗偦偺曄壔傪攃埇偟丄傛傝揔愗側峴摦傪庢傞偙偲偱擔忢傪憲偭偰偄傑偡丅偙偺傛偆偵丄乽尒傞乿偙偲偼丄巹偨偪偵偲偭偰暔懱偺懚嵼偲偦偺塣摦偲傪擣幆偡傞偙偲傗丄娤嶡幰帺恎偺奜奅偵偍偗傞埵抲丒曽岦丒塣摦傪擣幆偡傞偙偲偱偁傝丄傑偨丄偦偆偟偨帇妎忣曬傪傕偲偵懳徾暔傊庤傪怢偽偟偨傝丄巔惃傗恑峴曽岦傪惂屼偟偨傝偡傞側偳峴摦惂屼傪峴偆偙偲偱偁傞偲尵偊傑偡丅
丂嬤擭偺塮憸媄弍偺岦忋偵敽偄丄変乆偼擔忢惗妶偺條乆側応柺偱椪応姶偺偁傞塮憸僐儞僥儞僣傪尒傞偙偲偑偱偒傞偩偗偱側偔丄帺傜塮憸傪惂嶌偟攝怣偡傞偙偲偑梕堈偵偱偒傞傛偆偵側傝傑偟偨丅偦偺堦曽偱丄塮憸偵傛傞晧偺惗懱塭嬁偱偁傞塮憸悓偄傗娽惛旀楯偵娭偡傞曬崘傪栚偵偡傞婡夛偑憹偊偰偍傝丄偄傢備傞媄弍桪愭偱側偔恖娫岺妛揑懁柺傪傕摜傑偊偰丄塮憸棙梡偺晧偺懁柺傪廫暘偵攃埇偟丄傑偨塮憸偺岠壥揑妶梡偵岦偗偨2偮偺娤揰偐傜偺庢傝慻傒偑昁梫偱偡丅
丂巹偺愱栧暘栰偼丄恖偺抦妎斀墳偲巋寖偺暔棟摿惈傪掕検揑偵寢傃晅偗傞偙偲偱恖偺姶妎丒抦妎儊僇僯僘儉傪壢妛揑偵柧傜偐偵偡傞怱棟暔棟妛丄恖偺帇抦妎偺摿惈傪岺妛揑媄弍偵墳梡偡傞帇妎岺妛丄恖偺惗懱忣曬傪悢抣壔偟偰庢傝埖偆惗懱寁應妛偱偡丅偙傟傜傪捠偟偰摼傜傟傞抦幆傗媄弍傪梡偄偰恖偺惗妶偺埨慡傗寬峃偺偨傔偵栶棫偮婡婍偺奐敪傗巟墖媄弍傪峔抸偡傞偙偲傪栚巜偟偰偄傑偡丅
丂乬巟墖曽朄偺堦偮偲偟偰丄恖偵懳偡傞塮憸偵傛傞晧偺惗懱塭嬁傪寉尭偡傞傕偺偑嫇偘傜傟傑偡丅堦恖徧帇揰偺僟僀僫儈僢僋側摦偒傪敽偆塮憸傗庤怳傟塮憸傪帇挳偡傞偙偲偱丄摢捝丄傔傑偄傗揻偒婥傪敽偆塮憸悓偄偲屇偽傟傞徢忬傪敪徢偡傞偙偲偑偁傝傑偡丅偙傟偵懳偟偰偼丄塮憸偵娷傑傟傞塣摦惉暘傗廃攇悢丄怳暆側偳傪峫椂偟偨忋偱丄塮憸帇挳拞偺恖偺怱揹恾傗柆攇偲偄偭偨惗懱怣崋丄偝傜偵恖偺塮憸悓偄偵懳偡傞庡娤揑側昡壙傪慻傒崌傢偣傞偙偲偱塮憸悓偄偺梊應傪峴偆媄弍偑桳岠偵側傞偲峫偊偰偄傑偡丅
丂傑偨丄條乆側忈偑偄偐傜偺帺棫傪巟墖偡傞帪戙偵偍偄偰丄巟墖傪昁梫偲偡傞恖偺僯乕僘偵崌傢偣偨丄傕偟偔偼丄奺乆偑屄恖偺摿惈偵崌傢偣偰僙儖僼僇僗僞儅僀僘偱偒傞傛偆側暉巸岺妛揑墳梡媄弍偑媮傔傜傟偰偄傑偡丅偦偺傛偆側忬嫷偵偍偄偰傕丄塮憸偺岠壥揑側妶梡傪捠偟偰忈偑偄傪帩偮曽乆偑埨怱偟偰棙梡偱偒傞儕僴價儕僥乕僔儑儞庤朄偺妋棫傗丄巟墖媄弍傊偺棟夝傪怺傔傞偨傔偺嫵堢妶摦傪恑傔偰偄偒偨偄偲峫偊偰偄傑偡丅

懡偔偺惗暔偼丄堏摦偵傛偭偰忣曬傗惗懚娐嫬丄怘椏傪妉摼偟丄娐嫬曄壔傊揔墳偡傞偙偲偱恑壔傪悑偘偰偒傑偟偨丅僸僩偵偲偭偰偼峴摦斖埻傪奼偘傞偙偲傗丄堏摦庤抜傪摼傞偙偲偼丄岲婏怱傪巋寖偟丄峴摦傗惗妶偺堄梸傪憹偟偰偔傟傞偙偲傕偁傝傑偡丅偡側傢偪丄乽堏摦偡傞偙偲乿偼丄巹偨偪偵偲偭偰偺崻尮揑側妶摦梫慺偲傕偄偊傑偡丅
丂彮巕崅楊壔幮夛傪寎偊丄傑偨條乆側忈偑偄偐傜偺帺棫傪巟墖偡傞尰戙偵偍偄偰丄懡偔偺恖偺堏摦偺忈奞傪尭傜偡僶儕傾僼儕乕偲偄偆峫偊曽偑怹摟偟偰偒偰偄傑偡丅抜嵎偺彮側偄捠楬傗僄儗儀乕僞傗僄僗僇儗乕僞偺惍旛偲偄偭偨丄幮夛偺婎斦惍旛偑恑傔傜傟傞堦曽偱丄夦変傗旀楯偵傛偭偰惗妶峴摦傗堏摦偵晄曋偑惗偠偨応崌偵偼丄屄恖儗儀儖偱堏摦偺巟墖偑昁梫偲側偭偰偔傞偱偟傚偆丅
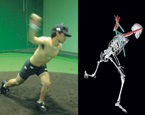
巹偺愱栧暘栰偼丄恖傗儌僲偺摦偒傪悢抣壔偟偰庢傝埖偆寁應岺妛丄婡夿傗尰徾傪偁傗偮傞惂屼岺妛丄婡夿揑側巇慻傒傪愝寁偡傞婡峔妛偱偡丅偙傟傜偺岺妛媄弍傪丄揹巕夞楬媄弍傗僐儞僺儏乕僞僜僼僩僂僄傾偱摑崌偟偨傕偺偼儊僇僩儘僯僋僗偲屇偽傟丄幮夛偺僔僗僥儉傗暉巸媄弍側偳偲懡偔偺愙揰偑偁傝傑偡丅偦偙偱丄偙偺媄弍傪屄恖儗儀儖偺堏摦巟墖偵墳梡偟丄婡婍奐敪傗巟墖媄弍傪峔抸偡傞偙偲傪栚巜偟偰偄傑偡丅
丂偦偺巟墖曽朄偺堦偮偼丄僸僩偺摦偒傪僒億乕僩偡傞傕偺偱偡丅堉巕偐傜棫偪忋偑傝丄抜嵎傗奒抜傪忋傝壓傝偡傞側偳偺摦嶌偼丄嬝椡偺掅壓傗夦変偵傛偭偰椡傪弌偣側偄応崌偵偼崲擄側傕偺偲側傝傑偡丅偙傟傜偵懳偟偰偼丄儌乕僞偺夞揮椡傗嬻婥偺埑椡側偳偺懠偺椡偺彆偗傪摼傞媄弍偑桳岠偲側傝傑偡丅傑偨丄壆奜偱偼丄帺揮幵傗帺摦幵側偳丄傛傝戝偒側僄僱儖僊乕傗懍搙傪憖傞堏摦庤抜偑憹偊傞偨傔丄廃埻偺僸僩傗幵偲偺愙怗丒徴撍傪旔偗偰埨慡傪妋曐偡傞崅搙側敾抐偲憖嶌偑梫媮偝傟傑偡丅旀傟偰偄偨傝柊偔側偭偰偄偨傝偟偰敾抐傗憖嶌偑擄偟偄忬嫷偱偼丄僇儊儔傗儗乕僟乕偐傜摼傜傟傞忣曬偱僸僩偺抦妎傪丄傑偨憖嶌峴摦偺夝愅丒昡壙寢壥偐傜僸僩偺憖嶌傪丄偦傟偧傟巟墖偡傞媄弍偑墳梡偱偒傑偡丅
丂嬤偄彨棃丄懡偔偺堏摦庤抜偼丄抦擻壔丒帺摦壔偝傟偨婡夿傗儘儃僢僩偑扴偆偐傕偟傟傑偣傫丅応崌偵傛偭偰偼丄僸僩偑堏摦偐傜摼偰偒偨丄岲婏怱傪枮偨偡宱尡傗峴摦偟偨偄偲偄偆堄梸偑掅壓偟偰偟傑偆偐傕偟傟傑偣傫丅偦偺傛偆側忬嫷偵偍偄偰傕丄埨慡側堏摦傪巟墖偡傞媄弍偲偦傟傪巊偆僸僩偲偺娭學偑傛傝傛偄傕偺偲側傞傛偆丄僸僩偺堏摦傪拞怱偲偟偨巟墖媄弍偺尋媶傗丄巟墖媄弍傊偺棟夝傪怺傔傞偨傔偺嫵堢妶摦傪恑傔偰偄偒偨偄偲峫偊偰偄傑偡丅

庴摦曕峴棟榑傪梡偄偨曕峴偍傕偪傖偺惢嶌嫵幒

僪儔僀僶峴摦寁應偺偨傔偺僴儞僪儖撪憼宆埑椡僙儞僒