NHK学生ロボコンに向けた基板の製作をご支援いただきました!

こんにちは。新潟大学 科学技術研究部です!!
今回、JLCPCB 様より、NHK学生ロボコンに向けた機体製作で必要となる基板の製作をご支援していただきました。
製作した基板は以下の通りです。
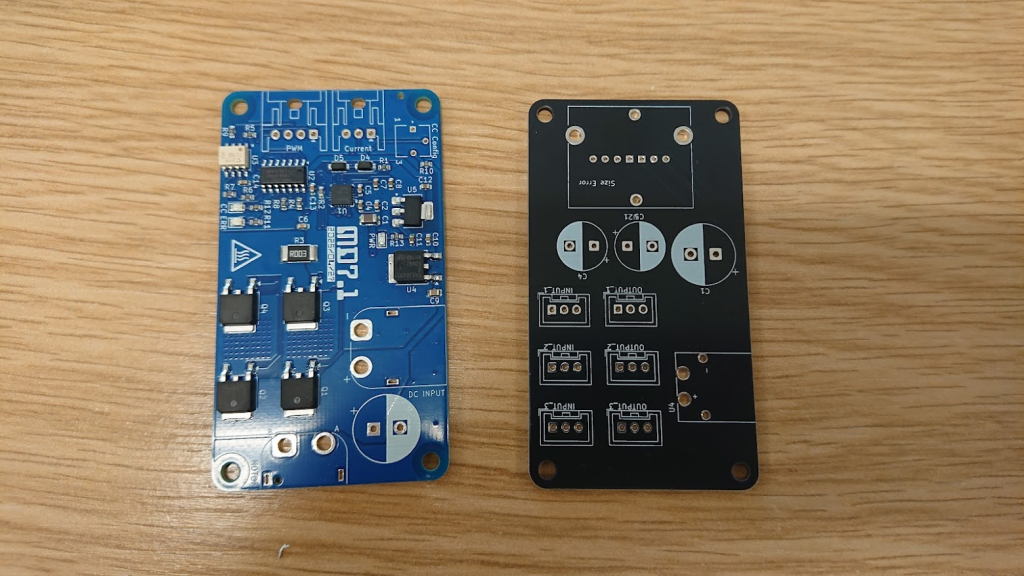
・DCモータドライバ
・サーボモータ電源基板
今回、JLCPCB のPCBAサービスを利用し、表面実装部品の実装を行っていただきました。
特にモータドライバについては、部品にピッチの細かい部品を多く用いるため、手実装では難しい部分があります。
そのような部品でも、PCBAによって非常にきれいに実装されていました。
手はんだで1枚ずつ実装する場合と比べ、実装時間の短縮、実装の品質安定、はんだ不良の低減といったメリットを大きく感じました。
ロボコンではソフトウェア開発も並行して進めるため、実装工程を省力化できる点は非常に助かります。
皆様も、基板製作の際は、JLCPCB のPCBAを活用してみてはいかがでしょうか。
最後となりますが、我々の活動をご支援していただいているJLCPCB様に感謝を申し上げます。
ここからは今回のDCモータドライバについて基板実装(PCBA)を含めた発注方法について解説します。
前回の記事 JLCPCBで部品実装してみた【発注編】 と同じ内容です。
基板発注までの詳しい手順をまとめた記事もございますので、こちらもご覧ください。
JLCPCB様から基板発注の支援をいただきました。 第1話
実行環境
Windows 11
KiCAD Version 8.0.9
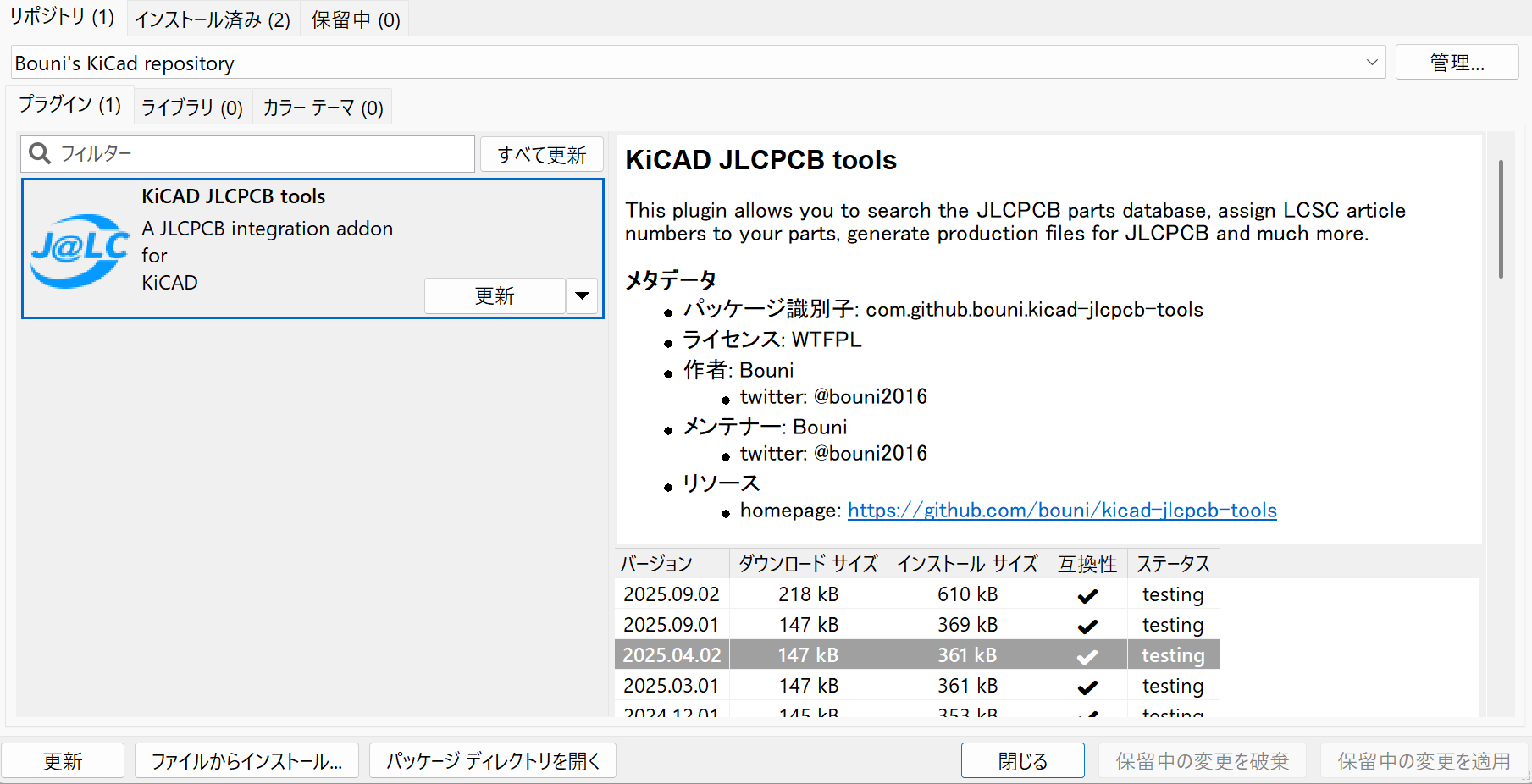
前準備
KiCADの拡張機能である、「KiCAD JLCPCB tools」をインストールします。KiCADの「プラグイン&コンテンツ マネージャー」の「リポジトリ」のページにある「管理」ボタンを押し、https://raw.githubusercontent.com/Bouni/bouni-kicad-repository/main/repository.json というリポジトリを追加することでインストールができるようになります。
発注用データを作成する
では、これより発注するためのデータを作成する方法を解説します。
基板レイアウトを作成
ここは、通常のKiCADと同様の方法で基板のレイアウトを作成します。
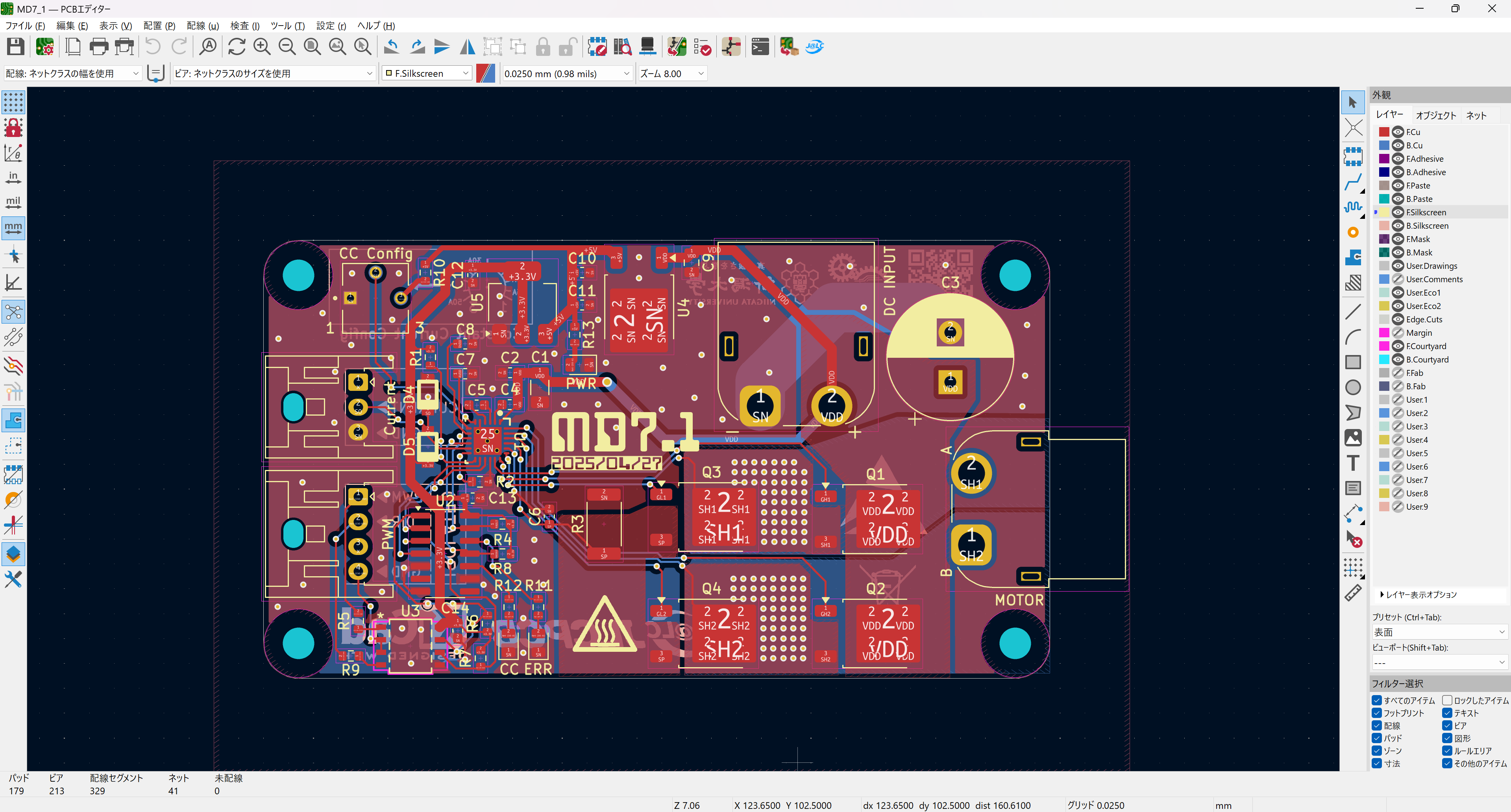
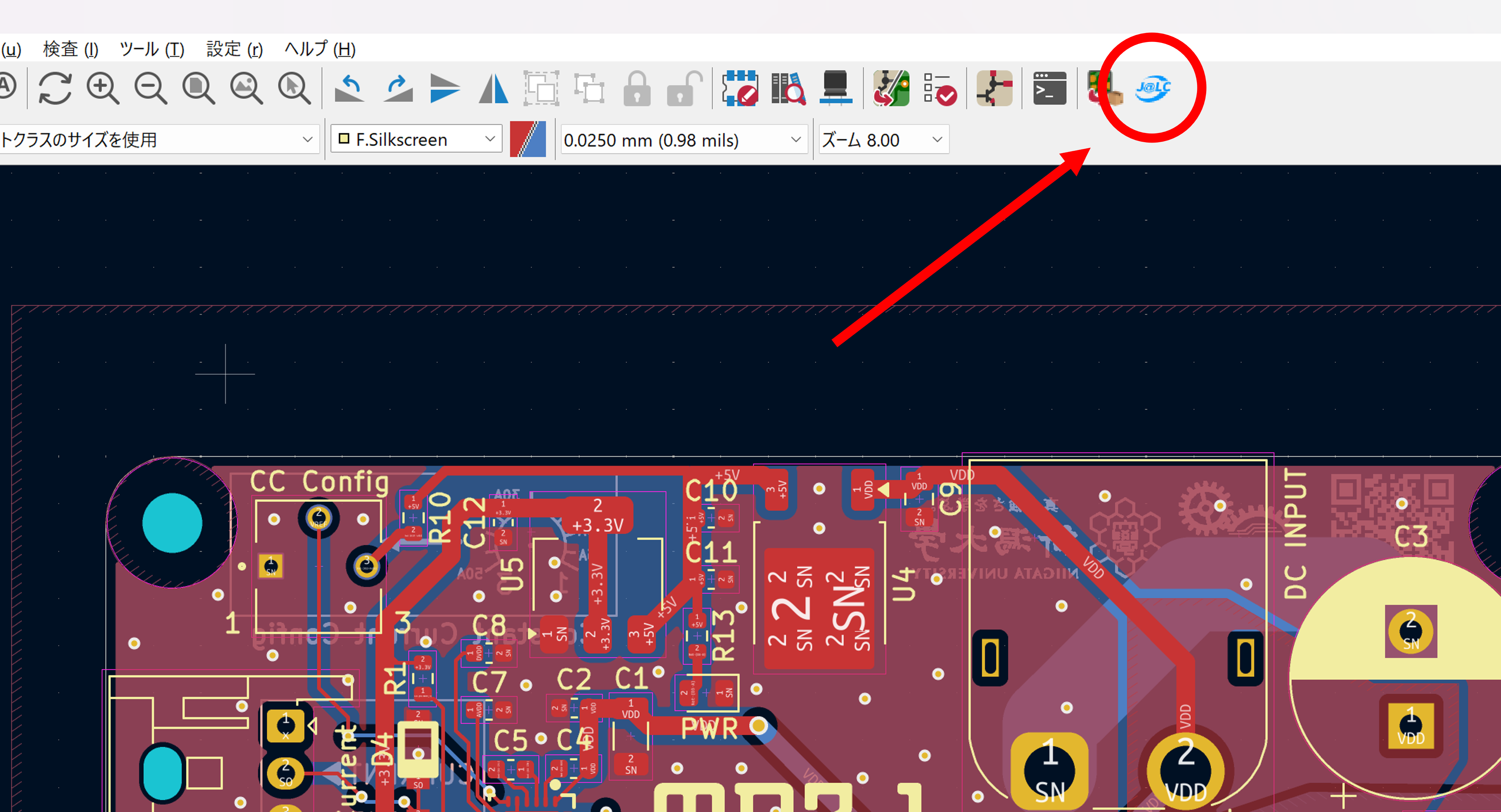
JLCPCB toolsを起動
図に示すアイコンをクリックすることで起動することができます。
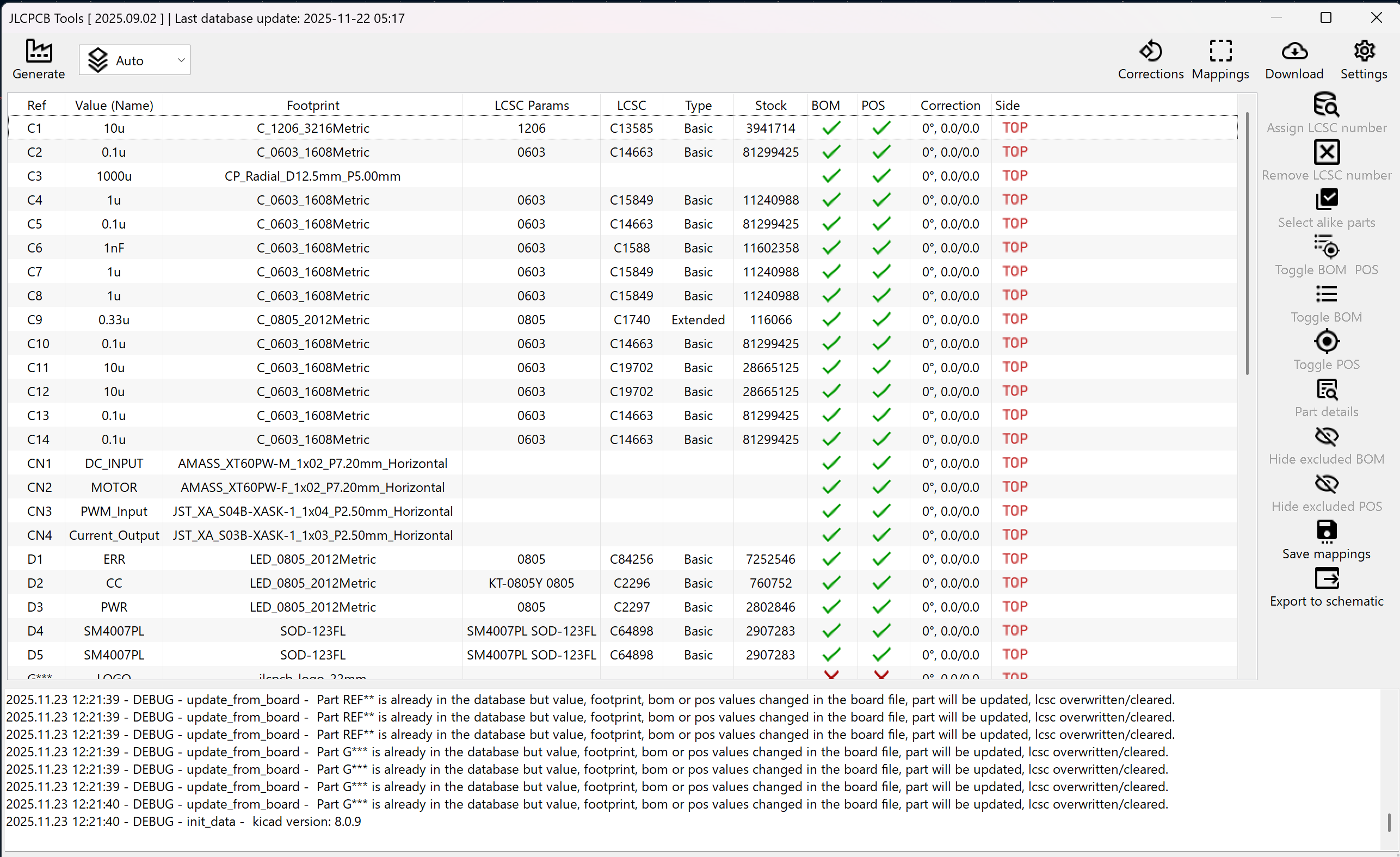
データを出力
図のようなウィンドウが表示されるので、左上の「Generate」をクリックすることでPCBAに必要となるガーバーデータ、BOMファイル、CPLファイルが、プロジェクトフォルダ内の"jlcpcb\production_files"フォルダに出力されます。
いよいよ発注
では、JLCPCBの発注ぺージにzip形式のガーバーファイルをアップロードします。

PCBAを有効化
基板の仕様オプションの下にPCBAを有効化するボタンがあるので、これを有効化します。PCBAする面をしっかり選べていることを確認すれば、あとの設定はデフォルトのままで問題ないです。

BOMとCPLファイルのアップロード
次へ進むと以下のような案内があるので、KiCADで出力したBOMとCPLファイルをアップロードします。

実装する部品の選択
進むと以下のような表が出てきます。ここで、JLCPCBで実装する部品にチェックを入れます。

[!WARNING]
基本的にチェックが入っていますが、稀にチェックが入っていなかったり、あるいは実装してほしくない部品にまでチェックが入っていることがあるので注意です。
部品の配置を調整
実際の部品の配置を確認しますがここが要注意ポイントです。FETやICの場合、向きや位置がおかしなことがあるのでここは重点的にチェックします。ダイオード類はより分かりにくいので注意です。該当部品をクリックし、十字キーとスペースキーで移動と回転が可能です。

あとはカートに入れて発注すれば約2週間で基板が届きます。