



2024年度 ものづくりプロジェクト製作作品
「ものづくりプロジェクト」は、学生が社会的課題、技術的課題を解決する目標を立て、プロジェクトチームを組み、技術開発プロセスの学習を行う科目で、
工学部のすべてのプログラム・分野から参加が可能な、工学部の共通科目になっています。工学部1~4年生、大学院生、
加えて他学部の学生などの多様なバックグラウンドを持つ学生が参加し、日々活発な活動を行っています。
今年度はものづくりプロジェクトとしては初めて、CANSATプロジェクトが国際的な大会に挑戦し、見事目標を達成しました。
海外で開催される大会に参加することは、技術的にも事務手続き的(学内承認、旅行手続き、引率者手配など)にも大変困難が伴いましたが、
学生・教職員が一丸となって協力することでそれらを解決し、7名の学生が国外で活動してきました。今後も国際的な舞台で活躍できる学生の輩出を目指して参ります。
一方、日本国内の大会に目を向けると、「NHK学生ロボコン大会」ベスト4および特別賞受賞、「能代宇宙イベント」Runback部門優勝、
「ロボカップジャパンオープン」「セキュリティコンテスト」参加など、様々な成果を残すことができました。
国際大会への参加、様々な全国規模の大会で好成績を残すなど、「ものづくりプロジェクト」として一つの到達点に達したような一年となりました。
以下に各プロジェクトに分けて、活動の一部を詳しくご報告させていただきます。
CANSATプロジェクト
「CANSATプロジェクト」は宇宙開発に関連する技術開発に取り組むプロジェクトです。自動で目的地まで到達するCANSAT(Runback競技)と、
ハイブリットロケットの製作を行っています。今年度のCANSATプロジェクトの活動では、大きな2つの成果がありました。
まずはアメリカ・ネバダ州で行われるCANSATの国際共同実験会への参加、次に秋田県能代市で行われる日本最大級の宇宙イベント「能代宇宙イベント」での優勝です。
アメリカ・ネバダ州のブラックロック砂漠にて、CANSATの国際的なサブオービタル(大気圏内)打ち上げ実証実験である「ARLISS2024」が行われました。
新潟大学CANSATプロジェクトからは、上級生チーム1チームが参加しました。ARLISSではアマチュアロケットグループ「AEROPAC」の協力のもと、
日米の大学が製作したCanSatの打ち上げを行います。 ARLISSは共同実験としての位置づけですが、競技会としての要素もあり、ロケットから放出されたCanSatが、
パラシュートなどを使って降下・タッチダウンし、 砂漠中の目的地に向かって自律的に走行し、どれだけゴールに近づけたかを競うカムバックコンペティションも開催されます。
新潟大学CANSATプロジェクト上級生チームは、過去の「能代宇宙イベント」出場などで積み上げた技術と経験を基に、高高度の打ち上げから安全に着陸し、
砂漠という過酷な環境を長時間走行しなければならない、より難易度が高いARLISSに初挑戦しました。
ミッションを「従来よりも確実な走行開始性能及び長時間運用性能を有したCanSatによる0mゴールの実証」と設定し、そのミッションを達成するために、
「ロケット上昇中の振動や分離の際に生じる衝撃に機体が耐えること」「着地後に機体とパラシュートが確実に分離できること」「数km単位の広範囲における機体と地上局の通信を可能にすること」
「数km単位の長距離走行のための電力供給を有していること」を主題に機体を開発しました。
これら機能を実現するため、カメラ・画像処理系を担当する高性能マイコンと、センサ・駆動系を担当する低消費電力マイコンの2つを搭載し、
必要なときのみ高性能マイコンが起動し消費電力を抑えるようにしたり、 電流電圧センサを始め、様々なセンサを表面実装し高密度基板を製作するなどしました。
もちろん、衝撃に耐える機体の構造や試験・走破性の高いタイヤ形状などの工夫もしました。
2024年9月9日に行われた開会式後、速やかに現地審査を通過し1回目の打ち上げに臨みました。「AEROPAC」のロケットによって、
上空3900m付近まで打ち上げられゴールから約3.3km付近に無事着地しました。途中、地磁気センサ(電子コンパス)の補正失敗や、大きな轍にはまりスタックするなど様々なピンチがありましたが、
バックアッププログラムの動作や、粘り強いスタック脱出動作を行うことで、 ゴールに向けて走行を続け、ゴール付近で目標物を探知するための画像処理プログラムも完璧に動作し、
打ち上げから約164分後、見事初参加・初打ち上げで0mゴール・ミッションを達成しました。 また0mゴールを達成したことにより、Accuracy Awardを受賞しました。
国際大会における受賞・タスククリアは、CANSATプロジェクトだけでなく、ものづくりプロジェクト全体としても初の快挙です。










国内に目を向けると、CANSATプロジェクトの2年生チームが、8月14日~23日の日程で、秋田県能代市で開催された「第20回能代宇宙イベント」に参加しました。
ARLISSよりは最大高度が低いですが、ドローンなどでCanSatを上空50m程度まで打ち上げ、 そこからパラシュートで降下し地面に着地、自動制御で指定されたゴールまで走行し、
CanSatがどれだけゴールに近づけたかを競います。CanSatは、サイズや重量が厳しくルールで規定されており、その中で各チームとも様々な工夫を凝らします。
今回出場した新潟大学のチームは、パラシュートで降下後、拡張するタイヤなどを使い、草木や轍を走破しやすくしました。
制御面ではパラシュートの色検知を行い、パラシュートを避ける経路を通ることでCanSatがパラシュートに絡まることを防ぎ、安定してゴールにたどり着けるよう、様々な工夫を行いました。
その結果、2回目の投下で見事0mゴールを達成し優勝しました。
一方、ハイブリットロケットの打ち上げについては、遠方から、ハイブリットロケットに対して、燃料の供給、点火などをおこなう GSE(Ground Support Equipment)
という機器の開発が遅れ、今年度の打ち上げは断念しました。次年度は、自作のGSEの運用も含めて、完全自団体によるハイブリットロケットの打ち上げを目指します。
■新潟大学CANTATプロジェクト(NiCs)ホームページ
■ARLISSのホームページ
■第20回能代宇宙イベントのホームページ



ロボコンプロジェクト
ロボコンプロジェクトは、1年生から段階的にレベルの高い複数の大会に出場することで技術力を上げ、最終目標として毎年6月初旬頃に行なわれる
「NHK学生ロボコン」優勝を目指して活動をしています。今年度も書類審査、2回のビデオ審査を突破し、6月9日に開催された「NHK学生ロボコン大会2024」に、
ロボコンプロジェクト(科学技術研究部)が出場しました。
今年度のテーマは、ベトナムの伝統的な農業方法の“棚田”を模した課題となっており、播種、収穫、収穫された穀物の倉庫への輸送をロボットが行います。
R1・R2と呼ばれる2台のロボットを製作し、播種、収穫はR1が担当、倉庫への輸送はR2が担当します。特に倉庫への輸送を行うR2は、完全に自動で動作しなければならないと規定されており、
例年と比べ一段とレベルの高い競技ルールとなっていました。
新潟大学は予選リーグで東北大学と対戦。R2が機体トラブルのため動作せず、R1のみの動作でしたが、そのR1がプログラム通り完璧に動作、ほぼ互角の点数となりましたが辛くも勝利しました。
続く電気通信大学との対戦では、短時間でトラブルを修正したR2も動作し、大きな点数差をつけて勝利しました。勝利したことにより、2年ぶりの決勝トーナメントに駒を進めました。
決勝トーナメントでは京都工芸繊維大学と対戦。両大学ともR2の動作が不安定な中、R1中心に得点を積み重ねました。結果は同点。
同点の場合は籾の倉庫への輸送が早かった大学が勝利するというルールが適応され、スピードで勝った新潟大学が勝利しました。
続く準決勝では、昨年の優勝校、豊橋科学技術大学と対戦。新潟大学は依然R2の動作が不安定で得点を獲得することができず、惜しくも敗退しました。
ベスト4以上の戦績を残すのは、2011年のベスト4、2015年の準優勝以来9年ぶりの快挙となります。加えてR1の速く正確で美しい苗植え動作が評価され、
鹿島建設株式会社様より特別賞を頂きました。また、大会の模様はYouTube(アーカイブ:
https://www.youtube.com/watch?v=cPr-MIDsitw)で配信されたほか、
7月15日(月・祝)午前10時5分から、NHK総合テレビでも放送されました。
■ロボコンチーム(科学技術研究部)ホームページ
■NHKロボコンホームページ
■YouTubeアーカイブ





学生フォーミュラプロジェクト
学生フォーミュラプロジェクトは、毎年9月頃、愛知県で行われる「学生フォーミュラ日本大会」に出場し、上位入賞を目指すプロジェクトです。
「学生フォーミュラ日本大会」とは、学生自らが約1年間でフォーミュラスタイルの小型レーシングカーを開発・設計することで、ものづくりの本質やプロセスを学び、
ものづの厳しさ・面白さを体験したり、企画・設計・コストなどのものづくりに必要な総合力を競う大会です。事前にオンラインで行われたコスト審査・デザイン審査、
対面で行われたプレゼン審査(静的審査)と、実際に車両を動かしてタイムなどを競う動的審査の合計点で順位が決まります。
国内外の大学・短大・高等専門学校・専門学校から約70校の参加があり、エンジン車両の他にEV車両も参加する大規模な大会です。
新潟大学学生フォーミュラプロジェクトは、製作スケジュールの遅れなど多々トラブルはありましたが、
昨年度、車両製作の遅れから大会に参加できなかった悔しさをバネに車両製作を進め、今年度は無事に大会会場へ車両を持ち込むことができました。
しかしながら、「車両製作のルールに則っており、かつ安全か」を審査する技術車検において複数の指摘事項があり、その修正に追われたことや、
続く騒音試験で騒音規制値をオーバーしたことなどから競技時間が締め切られ、動的審査に進むことはできませんでした。
その後のフォローアップ走行では、他大学に引けをとらないタイムで走行できたこともあり、悔しさの残る結果となりました。
■新潟大学 学生フォーミュラプロジェクトNEXTホームページ
■全日本学生フォーミュラ大会ホームページ





音響工学プロジェクト
音響工学プロジェクトは、「音を使って社会に貢献、面白いことをする」をモットーに、音に関する様々なものづくりを行ってきました。
今年度は音に関する2つのものづくりを行いました。一つ目は、効果音などを主なターゲットとしたより自由度の高い音作りを支援するツールとして、
画像にお絵描きをすることで新たな音を生成できる音加工アプリを製作しました。二つ目は、高価でなかなか練習環境を準備できない管楽器を対象に、
安価で練習時に音が出ない電子クラリネットを製作しました。
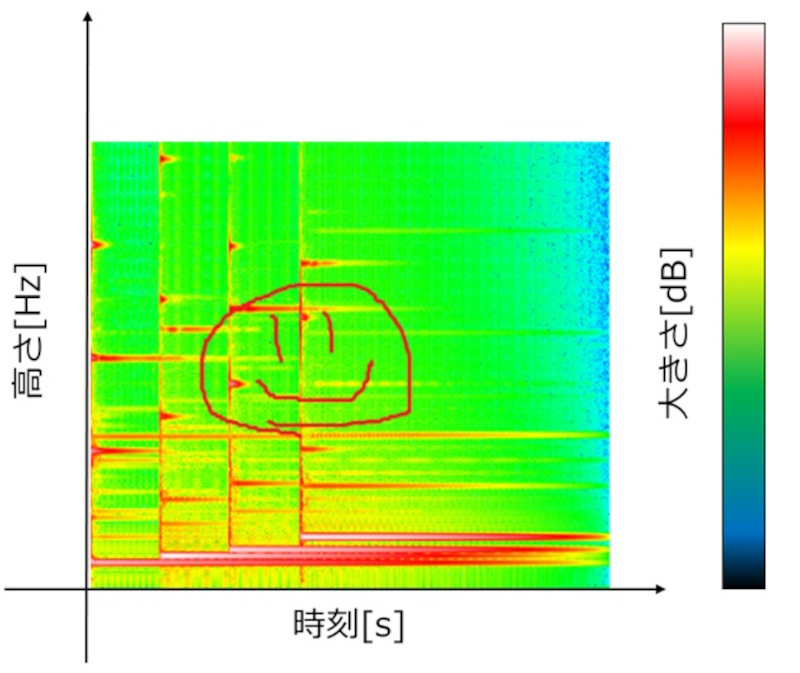
音加工アプリでは、既存の音源を読み込むことにより、横軸が時間、縦軸が周波数、色で強度を表すスペクトログラムを生成し、
そこにお絵描きをすることで、原音をベースとしつつも新しい音を生成することができました。また周波数の表示、時間の表示などを行い、
ユーザが直感的に操作できるようにしました。
電子クラリネットの製作では、開発途中にほぼすべてのコンセプトを満たした電子クラリネットが海外のメーカより販売されたことにより、
方針を転換し、声のピッチ検出をすることにより、声で演奏できるサックス系電子楽器の製作を目指すこととしました。
ピッチ検出プログラム、電子基板、筐体のプロトタイプを製作し、それらを使用してフィードバックを得ることで、よりよい電子楽器の製作を目指します。


情報セキュリティプロジェクト
情報セキュリティプロジェクトは、CTF(Capture The Flag)という競技を通じ、情報セキュリティ技術を学習することを目的とし、
その技術力の証明として、日本最大級のCTFであるSECCON CTFという大会に出場し各分野1問以上正答する、
及びSECCON CTF Beginnersという大会でで上位入賞することを目標としています。
CTFには様々な分野があり、主に実行ファイルの解析やOSの乗っ取りなどを行う低レイヤ班と、
暗号や通信、データベースやwebページなどの脆弱性を攻撃する高レイヤ班に分かれて活動を行っています。
特に今年度は、これまでの技術継承に重きを置き、定期的に勉強会を開くなど、プロジェクト全体の技術力向上を目指して活動を行ってきました。
目標としているSECCON CTF Beginners、SECCON CTFにも出場し、Beginnersの成績は、900以上のチームが出場する中35位という好成績(上位5%以内)を収めました。
SECCON CTF 2024の結果も昨年度の118位(653チーム中:305ポイント)から、81位(653チーム中:424ポイント)と、大幅に得点・順位共に上げることができました。
この結果には、プロジェクト間での積極的な知識リソースの共有を行ったことが効果を発揮していると考えられます。
非産業用ロボットプロジェクト
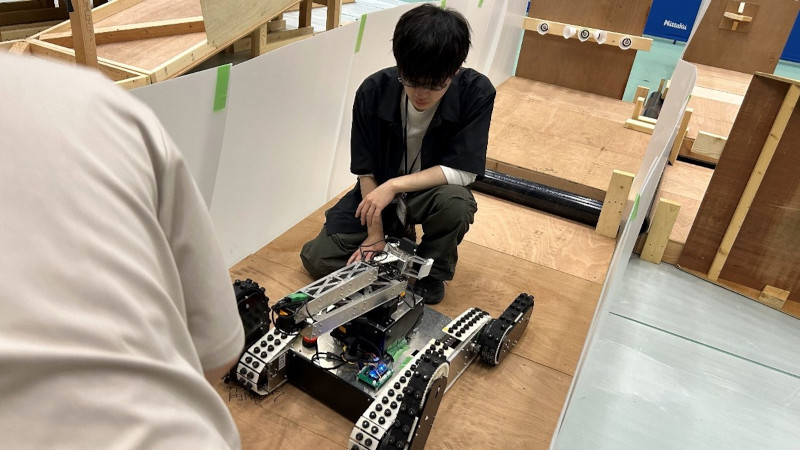
「非産業用(レスキュー)ロボットプロジェクト」は、人が入れない災害地等で情報収集を行うレスキューロボットを製作するプロジェクトです。
狭所や凹凸のある道をスムーズに移動できる走破性・操作性を試験する項目や、バルブの開閉などを行うことでロボットの器用さを試験する項目がある大会にて、
災害時にレスキューロボットに必要とされる標準的な性能を試験し、上位入賞することを目的としています。
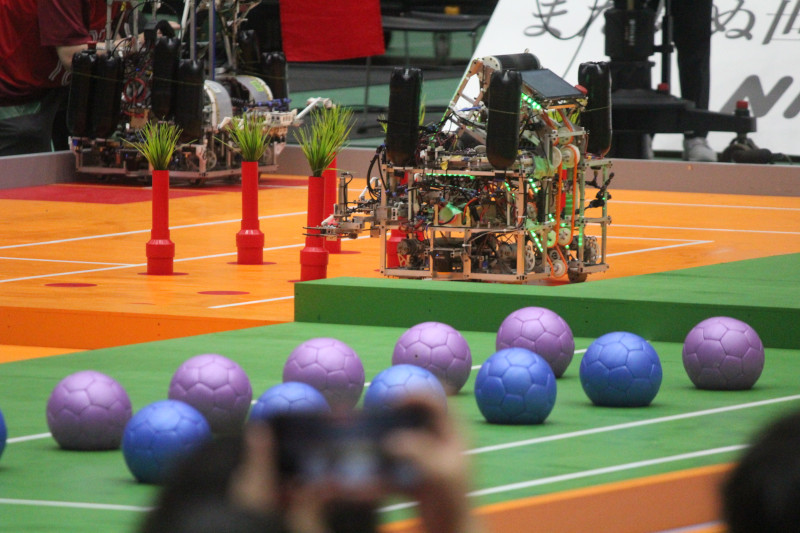
4月26日~29日の日程で、滋賀ダイハツアリーナで開催された「ロボカップジャパンオープン2024 レスキュー実機リーグ」に、2年ぶりに非産業用ロボットプロジェクトが出場しました。
ロボカップジャパンオープンは、ロボットの世界的な大会であるRoboCup世界大会を目指すチームを中心に、競技者を育成するロボット競技大会です。 レスキュー実機リーグのほかにも、
サッカー(小型車輪型、小型ヒト型、中型リーグ、シミュレーション)、レスキュー(シミュレーション)、@ホーム(実機、シミュレーション)、
インダストリアル(ロジスティクス)の各リーグに分かれて競技を行います。
レスキュー実機リーグは、危険な災害現場で人間に代わって情報収集や作業を行うロボット(レスキューロボット)の各種性能を評価し、各チームのロボットの総合力を競うことを目的に開催されます。
レスキューロボットは遠隔で操作しなければならず、ロボットにカメラなどを搭載し、ロボットや周囲の状況をオペレータに伝えなければなりません。
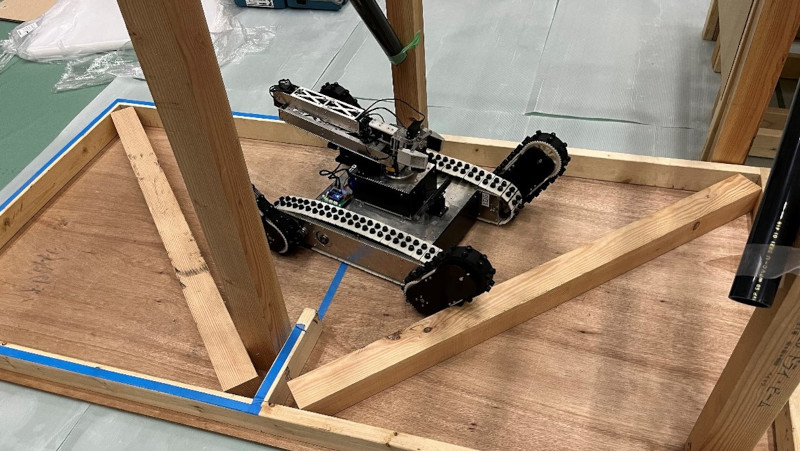
加えて、ロボットを思い通りに動かすことができるManeuvering能力、 凹凸の地形や階段を走行できるMobility能力、マニピュレータを使って繊細かつパワフルな作業ができるDexterity能力、
物体認識や探査環境の地図を作成することができるExploration能力などが測られる様々なタスクをクリアしなければなりません。
新潟大学非産業用ロボットプロジェクトは、いくつかのステージにおいてMOBポイント、DEXポイントを重ね、
40kg以下のスモールロボットで一番得点の高かったチームに贈られるBest-in-Class Small Robot賞を獲得しました。
■非産業用(レスキュー)ロボットプロジェクトホームページ
■RoboCupJapanホームページ

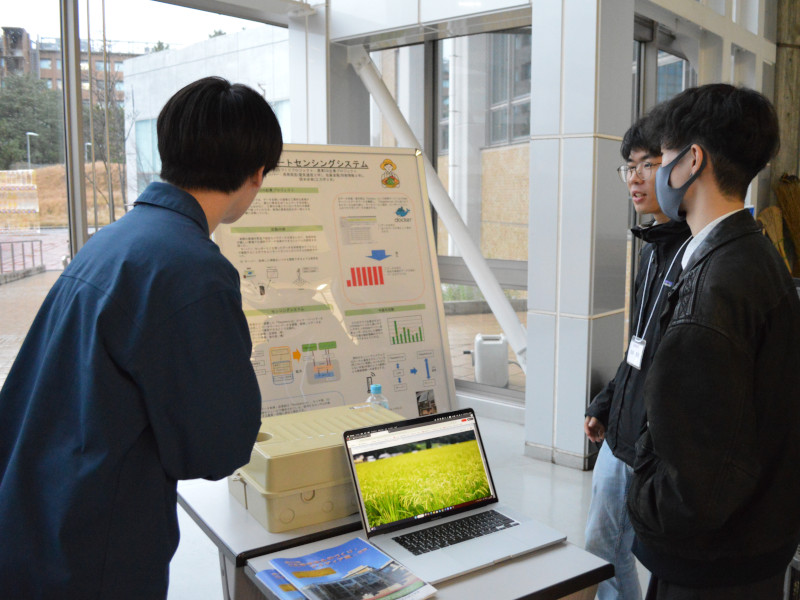
農業DX起業プロジェクト
農業DX起業プロジェクトは、データを活用したものを作り、農家さんに有料で使っていただくことで新潟の農業活性化の一助となることを目的としたプロジェクトです。
現在の農業は、多くは生産者の勘に頼った生産がされており、栽培に関するデータが少ないという問題点があります。そこで今年度は、
農場の気温などのデータを自動で取得し、サーバーに送信することでデータ化するリモートセンシングシステムの開発を行いました。
また、取得したデータをわかりやすくユーザに提示するwebページの製作も行いました。
今年度は比較的収益性の高いレンコンの栽培にフォーカスし、レンコンを栽培しながらデータの取得を目指しました。またセンサの数を増やし、
気温のほかにも、湿度や水温、日照量などを計測できるようにしました。レンコンの栽培自体は失敗してしまいましたが、次年度以降、
データのより良い取得と表示、栽培方法の比較実験を行う予定です。

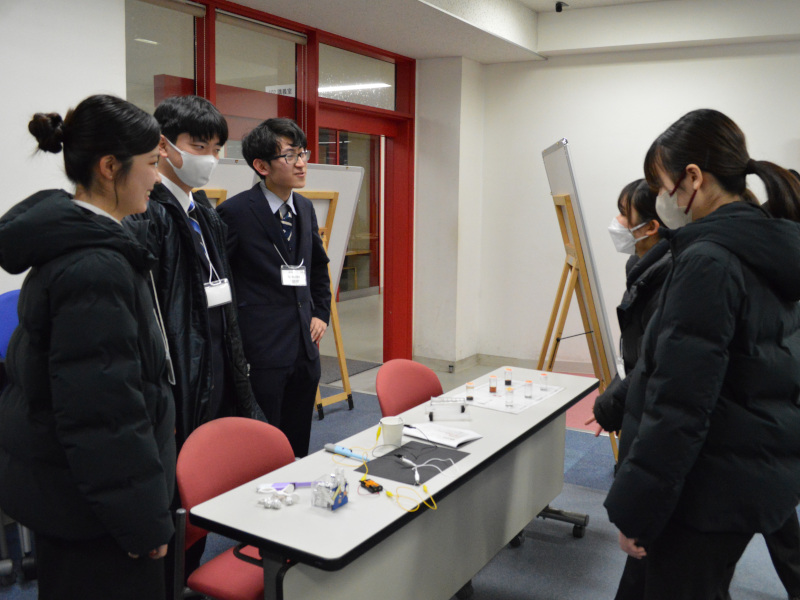
理科実験教材開発プロジェクト
理科実験教材開発プロジェクトは、主に小中学生向けに、アッと驚く、安価で楽しい理科実験教材を開発することを目的に活動しています。
今年度はろ過を題材とした「よごれた水をきれいにしよう」、初期の電磁波検出装置である「コヒーラ」の2つの教材を製作しました。
「よごれた水をきれいにしよう」では、活性炭を入れたシリンジを加圧ろ過することによって、実験時間が限られている理科教室で短時間で使用できるように工夫するとともに、
活性炭の粒子径などを変えることによって、醬油などから色素を取り除くなど、あっと驚くポイントも加えました。
「コヒーラ」では、目に見えない電磁波という概念を、小中学生になるべく簡単に説明するために、スライド等を工夫しました。
また、受信側の回路を一枚の基板にまとめることで教材を小型化し、持ち帰りを可能にしました。
今年度はプロジェクトメンバーが少なく、またタイミングも合わなかったことから、理科実験教室は開催できませんでした。次年度はメンバーを増やし、
複数回の理科実験教室を開催することを目指します。










![工学力教育センターパンフレット[PDF]バナー](../../images/bana-center_pdf.jpg)