EmbVision チュートリアル(6)
映像ストリーム処理 - Raspberry Pi™編 -
新潟大学 村松 正吾,高橋 勇希
Copyright (c), All rights reserved, 2014-2025, Shogo MURAMATSU and Yuki TAKAHASHI
Contents
概要
本演習では、Part5で作成したSimulink モデル を Raspberry Pi に実装し、 エクスターナルモードでのシミュレーションのほか、 スタンドアロンで実行する方法について学ぶ。
Raspberry Pi 設定
シングルボードコンピュータ Raspberry Pi への実装コードを Simulinkモデルを通じて生成することができる。
なお、本演習は Windows®上のMATLABで実行する必要がある。
以下では、Raspberry Pi 用のサポートパッケージ
が既にインストールされている前提で話を進める。
[ トップ ]
シミュレーションモデル
まず、本演習 Part5 で作成した Simulink モデル videogradfilt を Raspberry Pi 用に変更しよう。
モデル videogradfilt を読み込み、 videogradfiltraspi として保存する。
open_system('videogradfilt') save_system('videogradfilt','videogradfiltraspi')
Raspberry Pi 用の実装コード生成を行う Simulink モデルは、 全てのブロックがコード生成に対応している必要がある。 さらに、各種入出力ブロックは Raspberry Pi 用のブロックライブラリから 選択して使用する必要がある。
Raspberry Pi 用のブロックライブラリは、Simulinkライブラリブラウザーから
- Simulink Support Package for Raspberry Pi hardware
を選択すればよい。
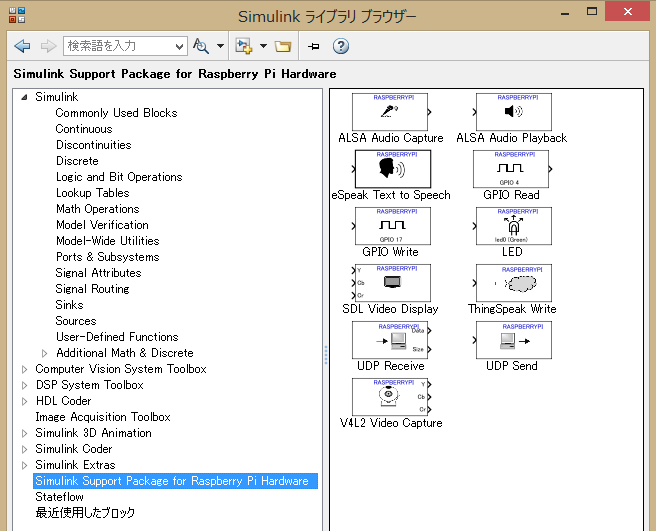
あるいは、MATLAB® コマンドウィンドウ上から
raspberrypilib
と打ち込んでも良い。
映像入出力ブロックを Raspberry Pi 用の入出力ブロックに置き換えよう。
- 「From Multimedia File」「RGB to Gray」→ 「V4L2 Video Capture」
- 「To Multimedia File」 → 「SDL Video Display」
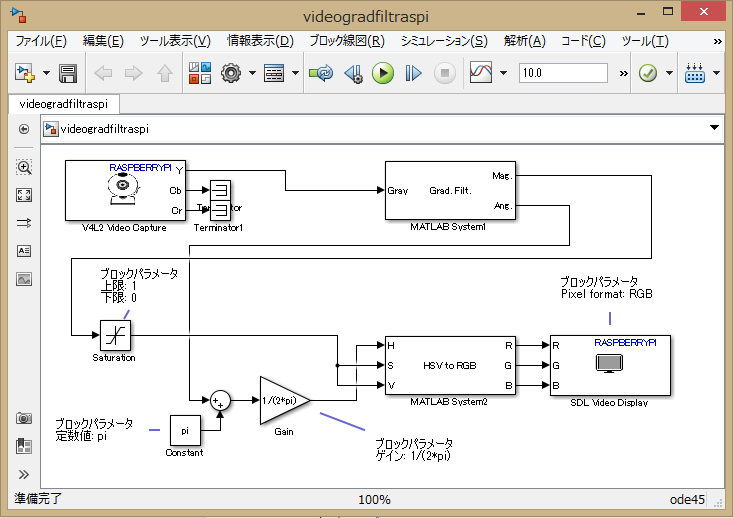
「V4L2 Video Capture」ブロックの出力Yはグレースケールに対応する。 本モデルでは、残りの出力 Cb,Crを利用しないため、以下の終端ブロックを接続した。
また、後のRaspberry Pi への実装のために、ブロックパラメータのAdvancedから、
「Enable Manual focus」のチェックを外しておく。
カメラ次第だが、これを外すことでピントが合うようになる。
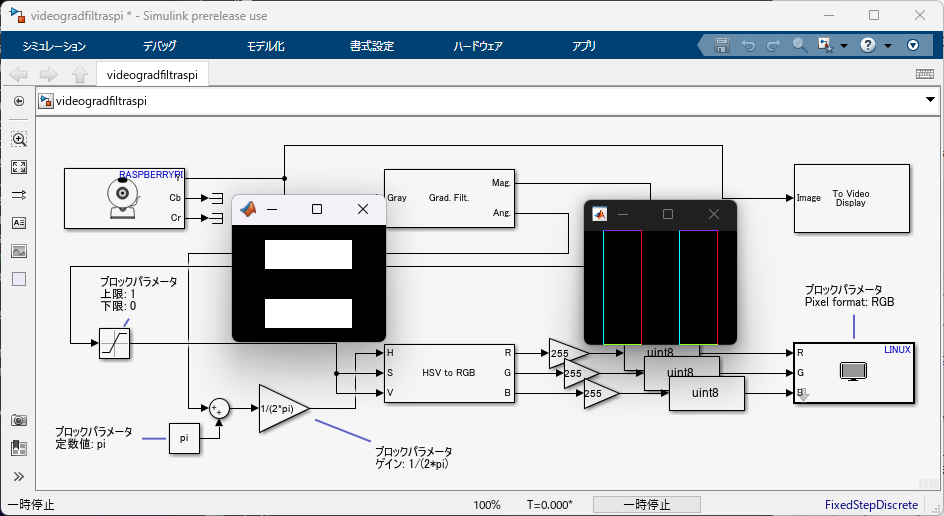
「SDL Video Display」ブロックでは RGB 入力ができるよう、 ブロックパラメータ Pixel format を RGB と編集した。
早速、実行してみよう。
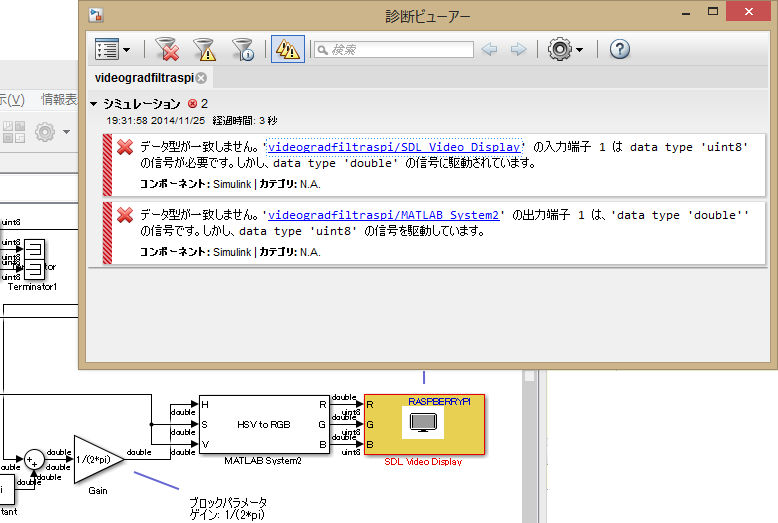
すると、「SDL Video Display」ブロックの入力部でデータ型の不一致による エラーが生じる。
原因は、「SDL Video Display」ブロックが8ビット符号なし整数型(uint8)を 要求するのに対し、「HSV to RGB」ブロックが実数型(double)でデータを出力 するためである。
この問題を回避するために、ゲイン調整とデータ型変換を行うブロック
を「SDL Video Display」ブロックの入力部に挿入し実行しよう。
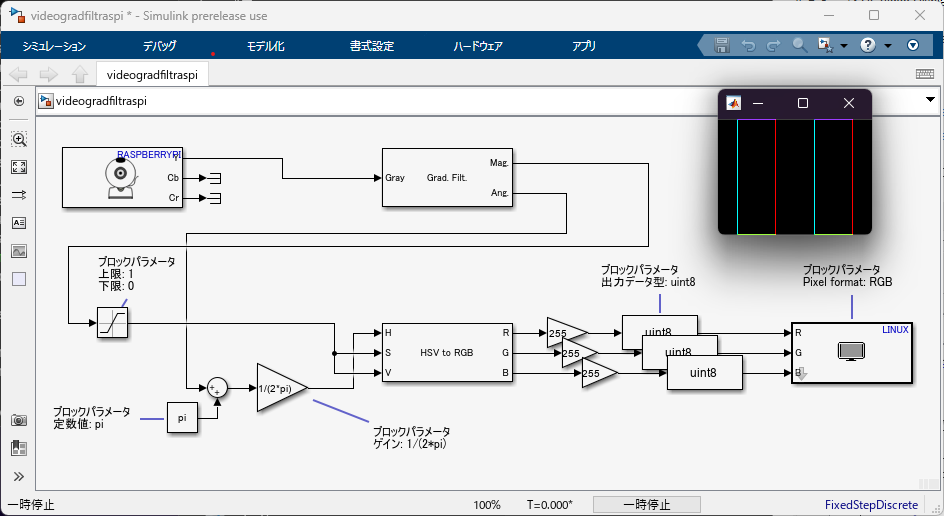
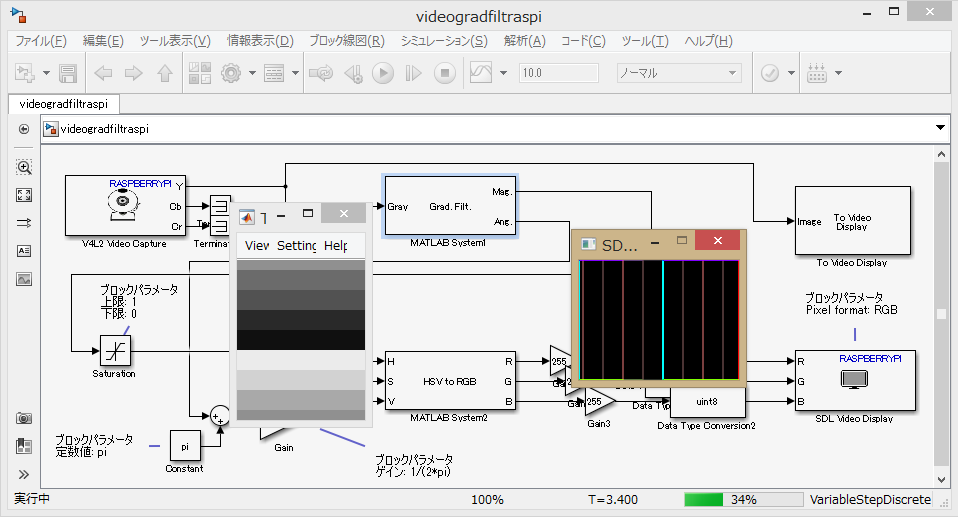
無事実行され、ダミーの映像処理が実行される。
ここで
- 「V4L2 Video Capture」ブロックは水平と垂直を転置して出力する。
- 「SDL Video Display」ブロックは入力の水平と垂直を転置して表示する。
という点に注意してほしい。 このことを確かめるために、「Computer Vision Toolbox/Sinks」内にある
- To Video Display ブロック(Windows®のみ)
を一時的に 「V4L2 Video Capture」の出力Yに接続して、シミュレーションを実行 してみよう。
「V4L2 Video Capture」の出力と「SDL Video Display」の表示を比べると 互いに転置の関係にあることが分かる。
したがって、勾配フィルタの方向を修正しなければならない。 「Filt.Grad.」ブロックのKernelプロパティを
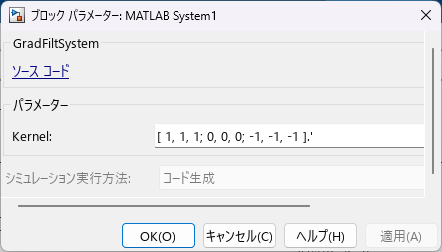
のように転置するよう編集して、勾配フィルタの方向を修正しよう。
再度、モデル videogradfiltraspi を実行しよう。
出力の彩色(勾配方向)が修正されていることが確認できる。
以降、「To Video Display」ブロックは不要なのでモデルから削除しておこう。
※削除しないと次項のエクスターナルモードの実行でエラーが出るため、必ず削除すること。
[ トップ ]
ハードウェア実行の準備
Raspberry Pi 用に構築したモデルを実際のボード上で動作させてみよう。
Simulink モデルを Raspberry Pi 上で動作させる方法には、
- エクスターナルモードシミュレーション
- スタンドアロン実行
の二種類がある。
エクスターナルモードでは、Simulink モデルから Raspberry Pi 上で 動作する実装コードを生成し、Raspberry Pi 上で実際に動作させ、 その出力を手元の Simulink 上で確認する。
一方、スタンドアロン実行では、Simulink モデルから Raspberry Pi 上で 独立に動作する実装コードを生成し、Raspberry Pi 上で動作させる。
まず、準備として Raspberry Pi model 5 を用意し
- MicroSD カード
- LAN ケーブル
- Web カメラ
- 電源ケーブル
の順に接続しよう。


なお、MicroSD にはRaspberry Pi Imager
からRaspberry Pi OSのイメージの書き込みが完了しているものとする。
では、Simulink から Raspberry Pi への接続を行うための準備をしよう。
Simulink モデル videogradfiltraspi のメニューバーから
- [ハードウェア] > [ハードウェア設定]
へと進む。
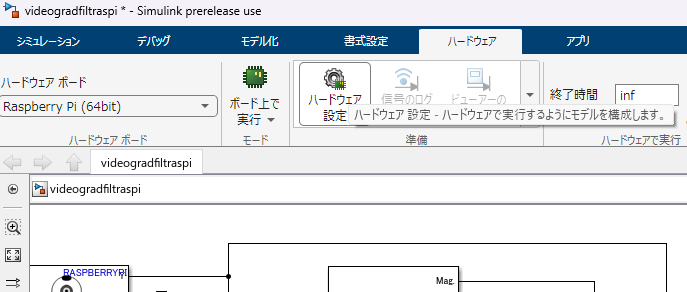
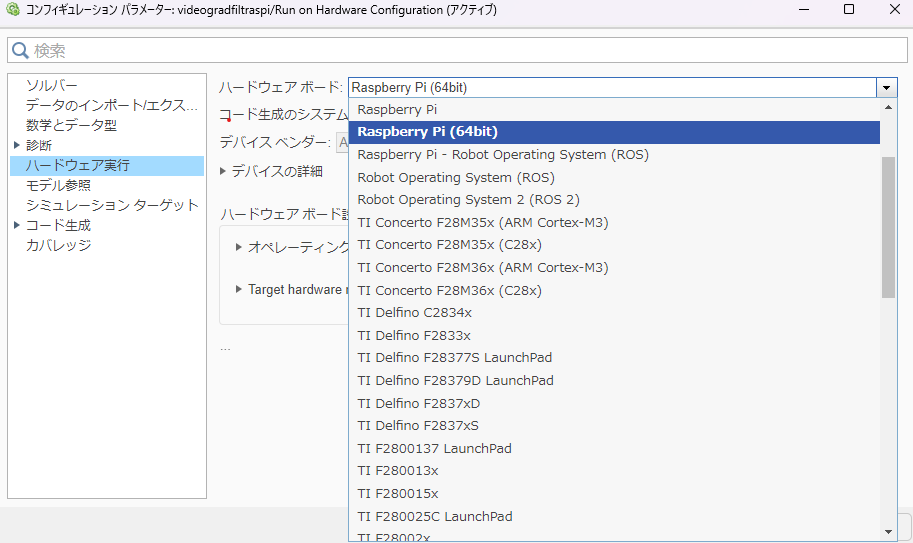
ターゲットハードウェアとして「Raspberry Pi(64bit)」を選択する。
接続するボードの情報を確認する。
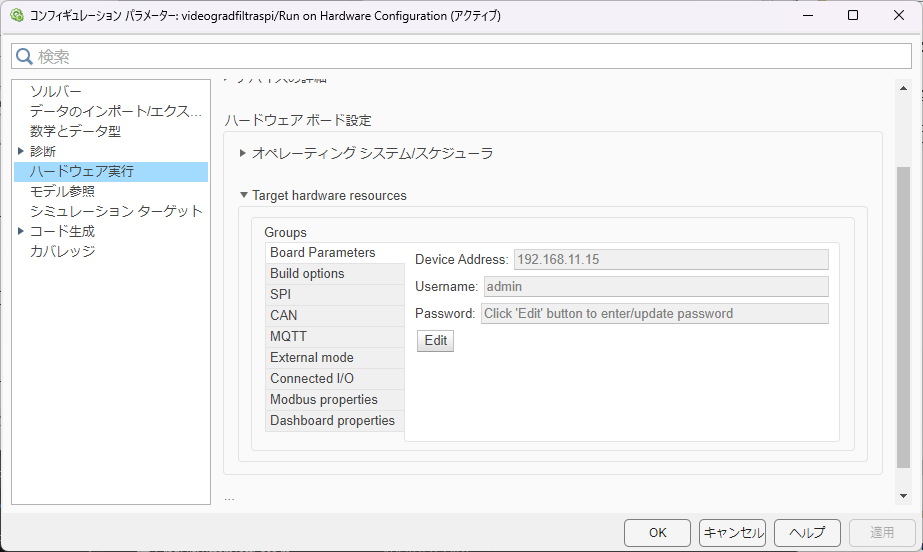
特に、「Target hardware resources」の「Device Address」は、各ボード毎に設定が異なるので 編集が必要となる。
- 演習中に必要な情報を提供する。
IPアドレスが分かれば、以下の用に編集すればよい。(192.168.11.5は一例)
「適用」をクリックし、次にsimulinkモデルからraspberry pi上で実行するCコードを生成するための準備をする。
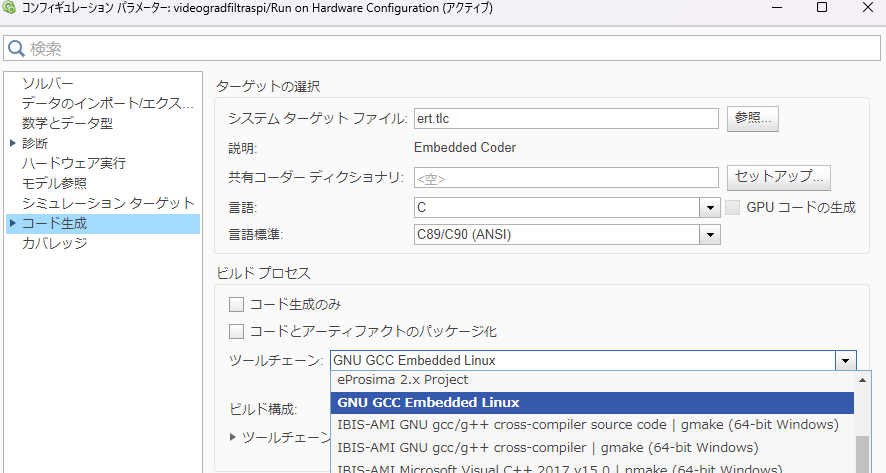
- [コード生成]
へと進み、ビルドプロセスのツールチェーンとして「GNU GCC Embedded Linux」を選択する。
「OK」をクリックし準備を完了する。
[ トップ ]
エクスターナルモード
では、Simulink モデル videogradfiltraspi をエクスターナルモードで動作 させてみよう。
まず、メニューバーからモードを
- ボード上で実行(エクスターナルモード)
へと変更する。
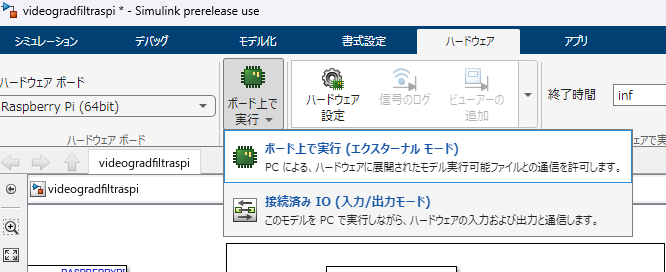
早速、「監視と調整」を押して実行してみよう。
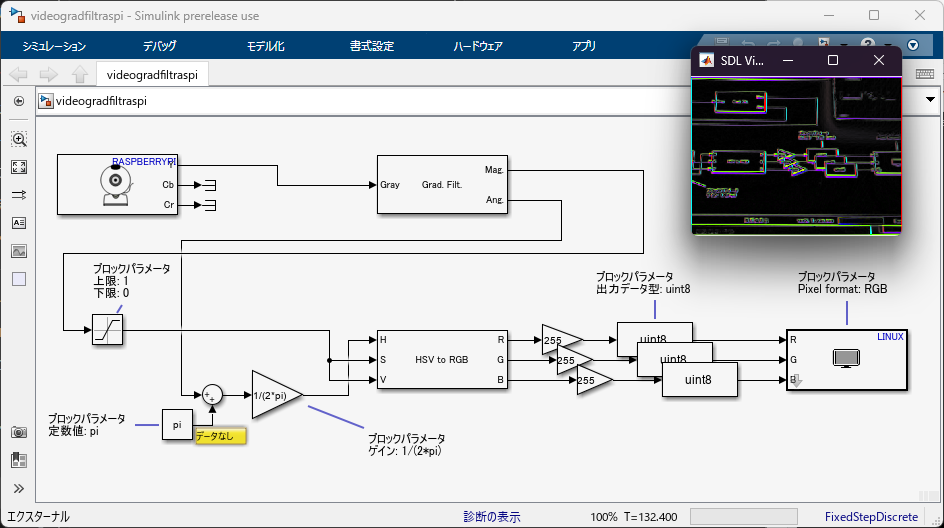
Raspberry Pi に接続した Web カメラの処理映像が Simulink 上で表示される。
[ トップ ]
スタンドアロン実行
では、Simulink モデル videogradfiltraspi を Raspberry Pi 上で スタンドアロン実行してみよう。
スタンドアロン実行のために以下の準備を行う。
- 電源ケーブルを一旦外す
- HDMIディスプレイ接続する
- 電源ケーブルを再度接続する

正しく接続されていれば、Rasbian の起動を Raspberry Pi に接続した ディスプレイ上で確認できる。
なお、Raspberry Pi Camera Module を利用するためには以下のサイトを参照してほしい。
http://www.mathworks.com/matlabcentral/answers/122199-simulink-with-raspberry-pi-camera-capture
Simulink モデル videogradfiltraspi に戻り、
- 「ビルド、展開、起動」
のボタンをクリックしよう。
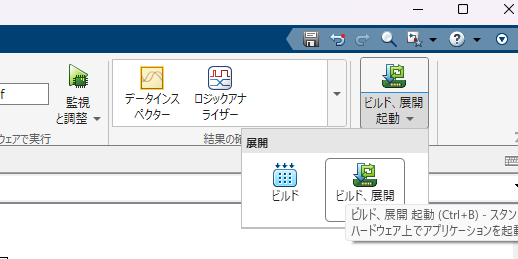
Raspberry Pi に接続されたディスプレイ上にカメラからの映像の 処理結果が表示されれば成功である。

以降、Simulink モデル videogradfiltraspi を閉じても、Raspberry Pi 上の 処理は継続される。
close_system('videogradfiltraspi')
MATLAB コマンドウィンドウ上で raspberrypi 関数を利用すると、接続中の Raspberry Pi の情報を取得できる。
h = raspberrypi
Raspberry Pi 上で動作中のモデル videogradfiltraspi を停止するには、 stop メソッドを利用する。
h.stop('videogradfiltraspi')
再度モデル videogradfiltraspi を開き、run メソッドを用いれば、 Raspberry Pi 上でモデルを再起動することもできる。
open_system('videogradfiltraspi') h.runModel('videogradfiltraspi')
[ トップ ]
演習課題
演習課題6-1. Sobel勾配フィルタ
演習課題4-1で紹介した Sobel カーネルに変えて Raspberry Pi 上で、 スタンドアロン実行しよう。
演習課題6-2. モデルの自作と実行(オプション)
自ら映像処理モデルを創造設計し、 Raspberry Pi 上で、スタンドアロン実行しよう。
以下に期待される拡張例を示す。
- Raspberry Pi カメラモジュール制御
- 固定小数点実装
- 並列実装(RasPi2上のクアッドコア用)
- 物体の検出および認識
- 音声・音響信号処理
- GPIO/I2C 制御
- ネットワークアプリケーション開発