EmbVision チュートリアル(4)
映像ストリーム処理 - MATLAB編 -
新潟大学 村松 正吾,高橋 勇希
Copyright (c), All rights reserved, 2014-2025, Shogo MURAMATSU and Yuki TAKAHASHI
Contents
概要
本演習では、MATLABにて映像ファイルの情報を読み込む方法のほか、 映像表示、映像ファイル出力、簡単な映像ストリーム処理について学ぶ。
準備として、開いている全ての Figure を close 関数で 閉じておく。
close all
映像入力
MATLABにおける映像入力は、 VideoReader クラスの readFrame メソッドを 利用することで実現できる。
vrObj = VideoReader('shuttle.avi');
frame = readFrame(vrObj);
変数 frame は映像データの最初のフレームを保持する。
shuttle.avi はRGBカラー映像なので、変数 frame は三次元配列となる。
特に指定をしなければ、データ型は符号なし整数8ビット型 uint8となる。
whos vrObj frame
Name Size Bytes Class Attributes frame 288x512x3 442368 uint8 vrObj 1x1 8 VideoReader
frame を表示してみよう。
後ほど利用するため、imshow のハンドルオブジェクトも用意しておく。
figure(1) hi1 = imshow(frame);

なお、変数 vrObj は、VideoReader のインスタンスオブジェクトとなっており、 映像に関する情報をプロパティとして保持している。
主なプロパティを以下にまとめる。
- BitsPerPixel: 一画素当たりのビット数 [bpp]
- FrameRate: フレームレート [bps]
- Height: 画面の高さ [pixels]
- Width: 画面の幅 [pixels]
properties(vrObj)
クラス VideoReader に対するプロパティ:
Duration
Name
Path
BitsPerPixel
FrameRate
Height
NumFrames
VideoFormat
Width
Tag
UserData
CurrentTime
したがって、画面の高さや幅、フレームレートなどの情報は 以下のようにして取得できる。
height = get(vrObj,'Height'); width = get(vrObj,'Width'); frameRate = get(vrObj,'FrameRate');
さらに、 readFrame メソッドを呼び出すと次のフレームを読み込む。
なお、imshow のハンドルオブジェクト hi1 の CData プロパティに frame の データを上書きすることで表示を更新している。
frame = readFrame(vrObj);
set(hi1,'CData',frame);

[ トップ ]
映像表示
映像入力オブジェクト vrObj の時刻を 0 に戻して、全てのフレームを表示しよう。
なお、 while ループ内で全てのフレームが 表示されるよう drawnow 関数で 各フレームの描画を強制する。
また、 hasFrame メソッドで 最終フレームか否かの情報を取得している。
set(vrObj,'CurrentTime',0); while (hasFrame(vrObj)) frame = readFrame(vrObj); set(hi1,'CData',frame); end
他に、 movie 関数での映像表示も可能である。 ここでは説明を割愛する。
[ トップ ]
映像出力
MATLABにおける映像出力は VideoWriter クラスの writeVideo メソッドを利用することで 実現できる。
映像入力オブジェクト vrObj の時刻を 0 に戻して、映像のコピーを AVIファイル shuttleclone.avi に出力してみよう。
set(vrObj,'CurrentTime',0); vwObj = VideoWriter('shuttleclone.avi'); properties(vwObj)
クラス VideoWriter に対するプロパティ:
Duration
Filename
Path
FileFormat
VideoCompressionMethod
ColorChannels
FrameCount
Width
Quality
VideoFormat
FrameRate
VideoBitsPerPixel
Height
set(vwObj,'FrameRate',frameRate); open(vwObj) while (hasFrame(vrObj)) frame = readFrame(vrObj); writeVideo(vwObj,frame); end close(vwObj)
AVIファイル shuttleclone.avi が出力される。
保存されたAVIファイルはMATLABの外部のツールで再生することができる。
[ トップ ]
映像処理
映像フレームの入力と出力の間に各フレームに対する処理を挿入することで、 映像ストリーム処理を実現できる。
以下では、演習(3)で作成した
- Rgb2GraySystem
- Hsv2RgbSystem
- GradFiltSystem
を利用して、フレーム毎の勾配フィルタ出力を映像化しよう。
まず、フレーム処理オブジェクトを生成する。
rgsObj = Rgb2GraySystem(); hrsObj = Hsv2RgbSystem(); gfsObj = GradFiltSystem();
次に、映像入力オブジェクト vrObj の時刻を 0 に戻し、 出力映像を保存するAVIファイル shuttlegrad.avi の準備をする。
set(vrObj,'CurrentTime',0); vwObj = VideoWriter('shuttlegrad.avi'); set(vwObj,'FrameRate',frameRate); open(vwObj)
映像処理を開始する。
while (hasFrame(vrObj)) frame = readFrame(vrObj); % フレーム入力 graysc = step(rgsObj,frame); % グレースケール化 [mag,ang] = step(gfsObj,graysc); % 勾配フィルタリング ang = (ang+pi)/(2*pi); % 偏角の正規化 mag = min(mag,1); % 大きさの飽和処理 [r,g,b] = step(hrsObj,ang,mag,mag); % 疑似カラー化 frame = cat(3,r,g,b); % RGB配列結合 writeVideo(vwObj,frame); % フレーム出力 end close(vwObj)
処理が終了すると、AVIファイル shuttlegrad.avi に処理結果が保存される。
[ トップ ]
フレーム間処理(オプション)
過去のフレームを記憶する System object クラスを定義することもできる。
連続する2枚のフレームの平均を出力する FrameAveSystem クラスを作成するため、 以下のテストケース FrameAveSystemTestCase を用意する。
classdef FrameAveSystemTestCase < matlab.unittest.TestCase %FRAMEAVESYSTEMTESTCASE FrameAveSystem のテストケース properties end methods (Test) function testFirstFrame(testCase) % 準備 width = 12; height = 16; % 入力フレーム frame1 = rand(height,width,3); % 期待値 cnt0Expctd = []; cnt1Expctd = 1; res1Expctd = frame1; % ターゲットクラスのインスタンス化 obj = FrameAveSystem(); % 初期状態の検証 state = getDiscreteState(obj); cnt0Actual = state.Count; testCase.verifyEqual(cnt0Actual,cnt0Expctd) % 処理結果 res1Actual = step(obj,frame1); state = getDiscreteState(obj); cnt1Actual = state.Count; % 処理結果の検証 testCase.verifyEqual(res1Actual,res1Expctd,'RelTol',1e-6) testCase.verifyEqual(cnt1Actual,cnt1Expctd) end function testThreeFrames(testCase) % 準備 width = 12; height = 16; % 入力フレーム frame1 = rand(height,width,3); frame2 = rand(height,width,3); frame3 = rand(height,width,3); % 期待値 cnt1Expctd = 1; cnt2Expctd = 2; cnt3Expctd = 3; res1Expctd = frame1; res2Expctd = (frame1+frame2)/2; res3Expctd = (frame2+frame3)/2; % ターゲットクラスのインスタンス化 obj = FrameAveSystem(); % 第1フレーム処理結果 res1Actual = step(obj,frame1); state = getDiscreteState(obj); cnt1Actual = state.Count; % 第2フレーム処理結果 res2Actual = step(obj,frame2); state = getDiscreteState(obj); cnt2Actual = state.Count; % 第3フレーム処理結果 res3Actual = step(obj,frame3); state = getDiscreteState(obj); cnt3Actual = state.Count; % 処理結果の検証 testCase.verifyEqual(cnt1Actual,cnt1Expctd) testCase.verifyEqual(cnt2Actual,cnt2Expctd) testCase.verifyEqual(cnt3Actual,cnt3Expctd) testCase.verifyEqual(res1Actual,res1Expctd,'RelTol',1e-6) testCase.verifyEqual(res2Actual,res2Expctd,'RelTol',1e-6) testCase.verifyEqual(res3Actual,res3Expctd,'RelTol',1e-6) end function testReset(testCase) % 準備 width = 12; height = 16; % 入力フレーム frame1 = rand(height,width,3); % 期待値 cnt0Expctd = []; cnt1Expctd = 1; cntrExpctd = 0; % ターゲットクラスのインスタンス化 obj = FrameAveSystem(); % 初期状態の検証 state = getDiscreteState(obj); cnt0Actual = state.Count; testCase.verifyEqual(cnt0Actual,cnt0Expctd) % 第一フレーム処理後の状態の検証 step(obj,frame1); state = getDiscreteState(obj); cnt1Actual = state.Count; testCase.verifyEqual(cnt1Actual,cnt1Expctd) % リセット後の状態の検証 reset(obj); state = getDiscreteState(obj); cntrActual = state.Count; testCase.verifyEqual(cntrActual,cntrExpctd) end end end
テストケース FrameAveSystemTestCase の検証を満たすように実装した FrameAveSystem クラスの例を以下に示す。
classdef FrameAveSystem < matlab.System properties preFrame % 前フレーム end properties (DiscreteState) Count % フレームカウント end properties (Access = private) end methods (Access = protected) % セットアップ(最初のステップ直前に実行) function setupImpl(obj,srcFrame) % 前フレームの初期化 obj.preFrame = srcFrame; % フレームカウントの初期化 obj.Count = 0; end % ステップ function resFrame = stepImpl(obj,srcFrame) % フレーム平均処理 resFrame = (obj.preFrame + srcFrame)/2; % 前フレームの更新←現フレーム obj.preFrame = srcFrame; % フレームカウントのインクリメント obj.Count = obj.Count+1; end % リセット function resetImpl(obj) % フレームカウントのリセット obj.Count = 0; end end end
result = run(FrameAveSystemTestCase);
FrameAveSystemTestCase を実行しています ... FrameAveSystemTestCase が完了しました __________
FrameAveSystem の実行例を以下に示す。
fasObj = FrameAveSystem(); set(vrObj,'CurrentTime',0); vwObj = VideoWriter('shuttleave.avi'); set(vwObj,'FrameRate',frameRate); open(vwObj) while (hasFrame(vrObj)) frame = readFrame(vrObj); % フレーム入力 frame = im2double(frame); % 実数型へ変換 frame = step(fasObj,frame); % フレーム平均処理 writeVideo(vwObj,frame); % フレーム出力 end close(vwObj)
処理が終了すると、AVIファイル shuttleave.avi に処理結果が保存される。
[ トップ ]
演習課題
演習課題4-1. Sobel微分フィルタ
垂直微分フィルタ係数として配列
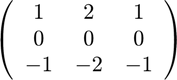
を、水平微分フィルタ係数として配列
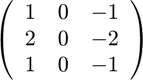
を利用した勾配フィルタオブジェクト
gfs = GradFiltSystem('Kernel',[ 1 2 1 ; 0 0 0 ; -1 -2 -1 ]);
を生成し、映像データ shuttle.avi に対する以下の処理を各フレームに対して 施してみよう。 また、その処理結果をAVIファイル shuttlesobel.avi に保存しよう。
graysc = step(rgsObj,frame); % グレースケール化 [mag,ang] = step(gfsObj,graysc); % 勾配フィルタリング ang = (ang+pi)/(2*pi); % 偏角の正規化 mag = min(mag,1); % 大きさの飽和処理 [r,g,b] = step(hrsObj,ang,mag,mag); % 疑似カラー化 frame = cat(3,r,g,b); % RGB配列結合
(処理例)
演習課題4-2. フレーム差分(オプション)
以下のテストケース FrameDiffSystemTestCase の検証を満たすように 連続する2枚のフレームの差分を出力する FrameDiffSystem クラスを作成しよう。
classdef FrameDiffSystemTestCase < matlab.unittest.TestCase %FRAMEDIFFSYSTEMTESTCASE FrameDiffSystem のテストケース properties end methods (Test) function testFirstFrame(testCase) % 準備 width = 12; height = 16; % 入力フレーム frame1 = rand(height,width); % 期待値 cnt0Expctd = []; cnt1Expctd = 1; res1Expctd = zeros(height,width); % ターゲットクラスのインスタンス化 obj = FrameDiffSystem(); % 初期状態の検証 state = getDiscreteState(obj); cnt0Actual = state.Count; testCase.verifyEqual(cnt0Actual,cnt0Expctd) % 処理結果 res1Actual = step(obj,frame1); state = getDiscreteState(obj); cnt1Actual = state.Count; % 処理結果の検証 testCase.verifyEqual(res1Actual,res1Expctd,'RelTol',1e-6) testCase.verifyEqual(cnt1Actual,cnt1Expctd) end function testThreeFrames(testCase) % 準備 width = 12; height = 16; % 入力フレーム frame1 = rand(height,width); frame2 = rand(height,width); frame3 = rand(height,width); % 期待値 cnt1Expctd = 1; cnt2Expctd = 2; cnt3Expctd = 3; res1Expctd = zeros(height,width); res2Expctd = (frame2-frame1); res3Expctd = (frame3-frame2); % ターゲットクラスのインスタンス化 obj = FrameDiffSystem(); % 第1フレーム処理結果 res1Actual = step(obj,frame1); state = getDiscreteState(obj); cnt1Actual = state.Count; % 第2フレーム処理結果 res2Actual = step(obj,frame2); state = getDiscreteState(obj); cnt2Actual = state.Count; % 第3フレーム処理結果 res3Actual = step(obj,frame3); state = getDiscreteState(obj); cnt3Actual = state.Count; % 処理結果の検証 testCase.verifyEqual(cnt1Actual,cnt1Expctd) testCase.verifyEqual(cnt2Actual,cnt2Expctd) testCase.verifyEqual(cnt3Actual,cnt3Expctd) testCase.verifyEqual(res1Actual,res1Expctd,'RelTol',1e-6) testCase.verifyEqual(res2Actual,res2Expctd,'RelTol',1e-6) testCase.verifyEqual(res3Actual,res3Expctd,'RelTol',1e-6) end function testReset(testCase) % 準備 width = 12; height = 16; % 入力フレーム frame1 = rand(height,width); % 期待値 cnt0Expctd = []; cnt1Expctd = 1; cntrExpctd = 0; % ターゲットクラスのインスタンス化 obj = FrameDiffSystem(); % 初期状態の検証 state = getDiscreteState(obj); cnt0Actual = state.Count; testCase.verifyEqual(cnt0Actual,cnt0Expctd) % 第一フレーム処理後の状態の検証 step(obj,frame1); state = getDiscreteState(obj); cnt1Actual = state.Count; testCase.verifyEqual(cnt1Actual,cnt1Expctd) % リセット後の状態の検証 reset(obj); state = getDiscreteState(obj); cntrActual = state.Count; testCase.verifyEqual(cntrActual,cntrExpctd) end end end
(処理例)
result = run(FrameDiffSystemTestCase);
FrameDiffSystemTestCase を実行しています ... FrameDiffSystemTestCase が完了しました __________
vrObj = VideoReader('shuttle.avi'); frameRate = get(vrObj,'FrameRate'); vwObj = VideoWriter('shuttlediff.avi'); set(vwObj,'FrameRate',frameRate); fdfObj = FrameDiffSystem(); open(vwObj) while (hasFrame(vrObj)) frame = readFrame(vrObj); % フレーム入力 frame = im2double(frame); % 実数型への変換 frame = step(fdfObj,frame); % フレーム差分処理 frame = frame/2+0.5; writeVideo(vwObj,frame); % フレーム出力 end close(vwObj)