

研究の目的、概要、期待される効果
情報通信技術の発達により、音声・映像に加えてさまざまな感覚情報を情報化・定量化し提示・再現する技術が、VRなどの最新技術として実用化されはじめています。
特に、指先で感じる物体の質感情報である触覚や、体全体で感じる速度や姿勢の変化などの体性感覚については、外的な刺激によって生起させてその強度を調整する方法が多く検討されています。
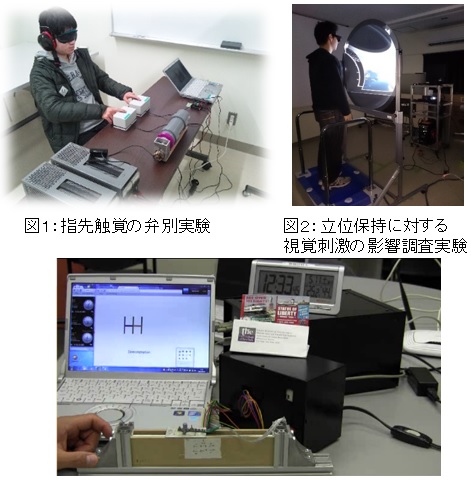
本研究室では、指先に振動を提示することで、物体表面に触れた際に感じる「つるつる」「ざらざら」といった摩擦感覚を再現する方法(図1)や、視覚情報(映像)で提示した周辺環境の動きやその速度情報から、自身の体の移動速度や傾斜感覚を再現する方法(図2)を検討しています。
これらの情報の伝送手段として、インターネットを介した遠隔地間で行う遠隔制御技術(図3)への応用、触覚や体感情報を含めた高現実感のコミュニケーションの実現が期待されています。
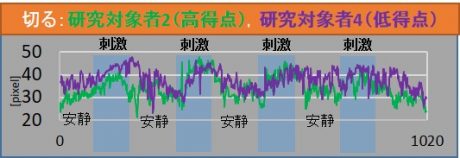
他方で、感覚刺激に対する生体信号の反応を計測することで、快・不快との関連性を分析(図4)し、映像や音声の安全な視聴につなげる基礎解析も進めています。
アピールポイント
遠隔制御技術については、国内・海外の商用インターネット回線において安定制御可能なことを実証しています。
つながりたい分野(産業界、自治体等)
人の感覚の定量化とその各種応用が必要となる、産業、技能、アミューズメントなど、幅広い分野との連携を期待します。
