
研究の目的、概要、期待される効果
日本では農業従事者の人口減少、高齢化が進み,農作業の負担が大きくなっています。例として水田に見られる畦畔の除草は、地形が斜面のため転倒などのリスクがあり危険な作業です。この課題を解決するため、畦畔上で自動走行を行いながら除草を行うロボットを開発しています。
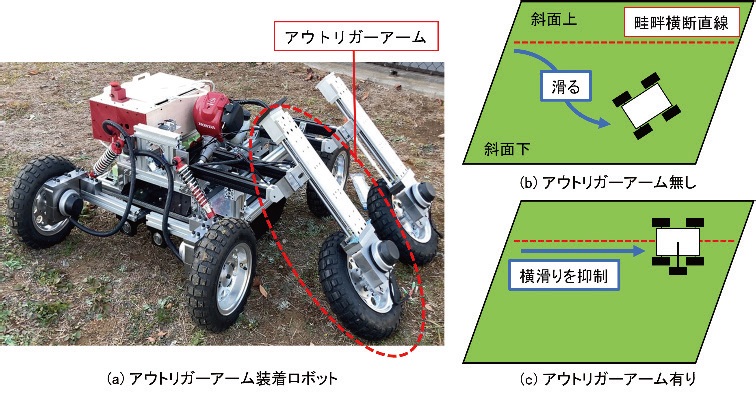
畦畔除草ロボットの課題として、斜面横断走行時に横滑りが発生することが挙げられます(図 1(b)参照)。解決策として、車両型のロボットにアウトリガーアームを装着するというアイデアを提案しています(図 1(a)参照)。斜面走行時にアウトリガーアームで車体を支持することで横滑りを抑制できます。
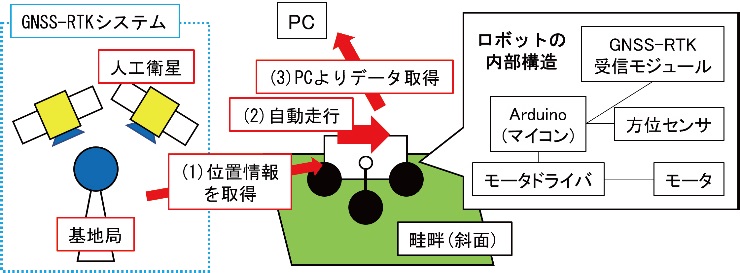
現在はロボットの畦畔上での自動草刈り走行システムを開発しています。人工衛星等からの情報(GNSS-RTK)および方位センサを用いて機体の位置、方向情報を取得し、目標経路上での走行の実現を目指しています。
畦畔の適切な管理は害虫の発生を抑え、米の品質改善や収穫量の増大につながります。また、大規模な水田では畦畔の領域も合わせて大きくなります。畦畔の除草という重要かつ量の多い作業の自動化は、国内でトップレベルの米生産量を誇る新潟県にとって非常に意義のある研究と考えます。
アピールポイント
本研究はスマート農業の促進に寄与し,問題を抱える日本の農業において重要な研究であるといえます.新潟県の米作り技術の向上という観点からも非常に意義があります.
つながりたい分野(産業界、自治体等)
スマート農業等に携わる分野の方と関われますと幸いです.農作業などで課題を抱えている自治体の方いましたら,ロボット技術等を用いた解決のお手伝いができれば幸いです.
